Algorithmus der TU München Autonomes Fahren: Echtzeitdaten sollen Unfälle verhindern
Hauptinhalt
14. September 2020, 17:00 Uhr
Selbstfahrende Autos werden nie müde oder unkonzentriert wie wir Menschen. Deshalb könnten sie für weniger Unfälle sorgen. Doch da gibt es ein Problem: Sie können niemals für alle Situationen im Straßenverkehr trainiert werden. Und das kann wieder zu Unfällen führen, denn bei überraschenden, neuen Situationen ist der Mensch besser als das autonome Fahrzeug. Forschende der TU München haben jetzt allerdings einen neuen Algorithmus entwickelt, der dieses Problem lösen soll.
Das Thema Sicherheit ist essentiell für die Frage, ob sich selbstfahrende Autos auf unseren Straßen durchsetzen werden. Denn sogar wenn es technisch problemlos möglich sein sollte, sie fahren zu lassen, bleibt ein moralisches Dilemma: Die Fahrzeuge dürfen keine Unfälle verursachen. Das hätte nämlich nicht nur Folgen für die Beteiligten, sondern vor allem auch für die Hersteller. Denn dann drohen ihnen aufwändige Gerichtsprozesse und womöglich sogar erhebliche Schadensersatzforderungen. Deshalb arbeiten Forschende und Industrie daran, die Algorithmen ihrer autonomen Autos "gerichtsfest" werden zu lassen.
Ein Algorithmus für Spontanität
Das größte Problem beim Thema Sicherheit für die autonomen Fahrzeuge ist die Art, wie sie lernen. Bisher setzen die Entwicklerinnen und Entwickler auf Algorithmen, die bestimmte Entscheidungen lernen oder direkt einprogrammiert bekommen. So wissen die Autos dann zum Beispiel auf der Straße: Ist die Gegenfahrbahn frei, kann überholt werden. Aber was, wenn plötzlich ein Kind auf die Straße springt? Dann kann der Mensch spontan reagieren, die Maschine aber nicht unbedingt. Denn bisher setzten die Entiwcklungsteams darauf, diese Entscheidungen auf ihre Übereinstimmung mit den Verkehrsregeln zu testen.
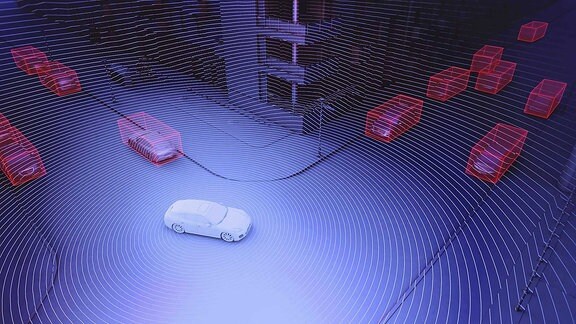
 tummeln sich da, blaue Pfeile zeigen die Richtung, in die sie sich bewegen, gelb-blaue Achtungszeichen symbolisieren Achtung vor anderen Verkehrsteilnehmern. Kleines Gerät vom DLR an Ampel. | Bildrechte: DLR/MDR WISSEN/Zinner")

Ein Forschungsteam der Technischen Universität München (TUM) geht jetzt einen anderen Weg: es hat einen Algorithmus entwickelt, der autonome Fahrzeuge sicherer machen soll. Der Artikel darüber ist im Fachmagazin Nature Machine Intelligence veröffentlicht worden. Bei dem Verfahren findet dieser Test gewissermaßen live während der Fahrt statt. So könne der Algorithmus auch auf Neues reagieren - etwa auf Situationen, die während der Konstruktion nicht bedacht wurden oder im Testbetrieb nicht vorkamen. So könne das Auto nie einen Unfall selbst verursachen und immer "gerichtsfeste" Entscheidungen treffen - auch, wenn es durch andere Verkehrsteilnehmer in einen Unfall verwickelt werden würde, schreibt das Münchner Team.
Ein Plan in der Hinterhand
Der TUM-Algorithmus sorgt durch ein Monitoring von Echtzeitdaten dafür, dass das autonome Fahrzeug immer eine Art Plan in der Hinterhand hat, um auf den Verkehr reagieren zu können.

Da natürlich kein Algorithmus auf alle denkbaren Verkehrssituationen trainiert werden kann, setzten die Forschenden auf einen Rahmen, der fortwährend im Hintergrund eine Art Korridor berechnet, in dem es zu keinem Unfall kommen kann - vorausgesetzt die anderen Verkehrsteilnehmer halten sich an die Verkehrsregeln. Der Münchner Algorithmus berechnet gewissermaßen anhand dessen, was gerade um das Auto herum passiert, Pläne, auf die das Fahrzeug zurückgreifen kann, sollte etwas überraschendes passieren.
Das Forschungsteam habe diesen Ansatz mithilfe von realen Verkehrssituationen getestet, die in städtischer Umgebung aufgezeichnet wurden, heißt es weiter. Die hätten sie dem Algorithmus vorgespielt und der habe nie eine unsichere Route vorgeschlagen.
Falscher Eindruck absoluter Sicherheit
Der Plan in der Hinterhand, der vor Unfällen schützt, klingt fast ein bisschen zu gut. So sehen das auch andere Fachleute.
Marcus Nolte von der Arbeitsgruppe Elektronische Fahrzeugsysteme an der TU Braunschweig etwa kritisiert, dass vor allem bei Laien der Eindruck entstünde, der neue Algorithmus garantiere, dass das autonome Fahrzeuge keine Unfälle mehr verursachen könne. Doch so eine absolute Sicherheit gebe es nicht und auch die Arbeit der Münchner gebe solch eine Garantie nicht her, so Nolte. Das Problem sei schon, dass davon ausgegangen werde, dass sich alle Verkehrsteilnehmer regelkonform verhalten.
Dann liefert das Framework eben keine garantiert kollisionsfreie Trajektorie, sobald sich jemand nicht an die programmierten Regeln hält.
Und Nolte ergänzt: "So etwas kommt im täglichen Verkehr allerdings immer wieder vor – zum Beispiel das Überfahren durchgezogener Linien oder Sperrflächen, weil jemand in zweiter Reihe geparkt hat." Somit habe der Algorithmus letztendlich denselben Nachteil wie andere modellbasierte Ansätze auch: "Eine Aussage ist am Ende so belastbar wie die schlechteste Modellannahme."

Der Leiter des Fachgebiets Fahrzeugtechnik an der TU Darmstadt, Prof Hermann Winner, sieht diesen Punkt zwar auch, ist aber generell weniger kritisch. Die Berechnung vor Ort im Auto mithilfe von Echtzeitdaten hält er für durchaus realistisch: "Die Implementierung für Beispielszenarien auf Basis ‚echter‘ Sensordaten bedeutet schon ein hohes Niveau für die Umsetzung des Ansatzes. Mit einem solchen ist die Verhaltensplanung nahezu ‚gerichtsfest‘, da auf eine verifizierte Weise geplant wird." Allerdings merkt Winner an, dass Verifikation immer nur auf Aufnahmen beruhe, deren Validität erst nach einer langen Erfahrungszeit bewertet werden könne. Das sei hier aber noch nicht der Fall. "Kurzgefasst: für die Verhaltensplanung eine bedeutende Arbeit, für die Sicherheitsaussage zum autonomen Fahren aber noch viel zu wenig für den genannten Anspruch", fasst Winner seinen Eindruck zusammen.
Prof. Philipp Slusallek vom Deutschen Forschungszentrum für Künstliche Intelligenz (DFKI) in Saarbrücken begrüßt zunächst, dass die Forschung sich überhaupt einmal so intensiv mit "gerichtsfesten" Entscheidungen von autonomen Fahrzeugen auseinandersetzt. Doch er schränkt ein: "Der Artikel betrifft dann allerdings nur einen sehr kleinen Teil des Problems des autonomen Fahrens, nämlich die Trajektorienplanung, also die Wegeplanung nachdem man annimmt, dass man die Umwelt genau und korrekt erkannt hat." Und das sei ebenso unwahrscheinlich wie die Voraussetzung, dass sich alle anderen Verkehrsteilnehmer an alle Regeln hielten. Sein Hauptproblem mit dem Ansatz sei aber, dass er davon ausgehe, dass er ein akkurates Bild der Umgebung als Input bekommt.
In diesem Bereich liegen die größten Probleme beim autonomen Fahren. Wenn ein Hindernis nicht als solches erkannt wird oder bei einer Fehlinterpretation an komplexen Kreuzungen oder Baustellen, dann bekommt das Verfahren falschen Input und geht von falschen Voraussetzungen aus und kann daher nur fragwürdige Ergebnisse liefern.
Die Fachleute sprechen dann von "Garbage In - Garbage Out" - also falsche "Abfalldaten" sorgen für falsche "Abfallergebnisse". Aus Slusallek Sicht lägen an diesem Punkt die eigentlichen Probleme beim autonomen Fahren.
(kie)

